Critically Damped Oscillator
Question
Solution
Short
Video
\(\LaTeX\)
No explanation / solution video to this exercise has yet been created.
Visit our YouTube-Channel to see solutions to other exercises.
Don't forget to subscribe to our channel, like the videos and leave comments!
Visit our YouTube-Channel to see solutions to other exercises.
Don't forget to subscribe to our channel, like the videos and leave comments!
Exercise:
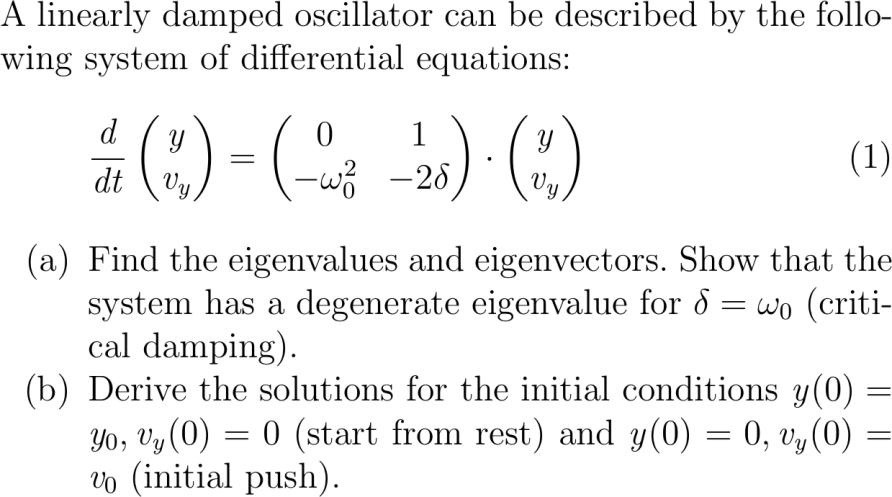
A linearly damped oscillator can be described by the following system of differential s: fracddtleftmatrixy v_ymatrixright leftmatrix & -omega_^ & -deltamatrixright leftmatrixy v_ymatrixright abcliste abc Find the eigenvalues and eigenvectors. Show that the system has a degenerate eigenvalue for deltaomega_ critical damping. abc Derive the solutions for the initial conditions yy_ v_y start from rest and y v_yv_ initial push. abcliste
Solution:
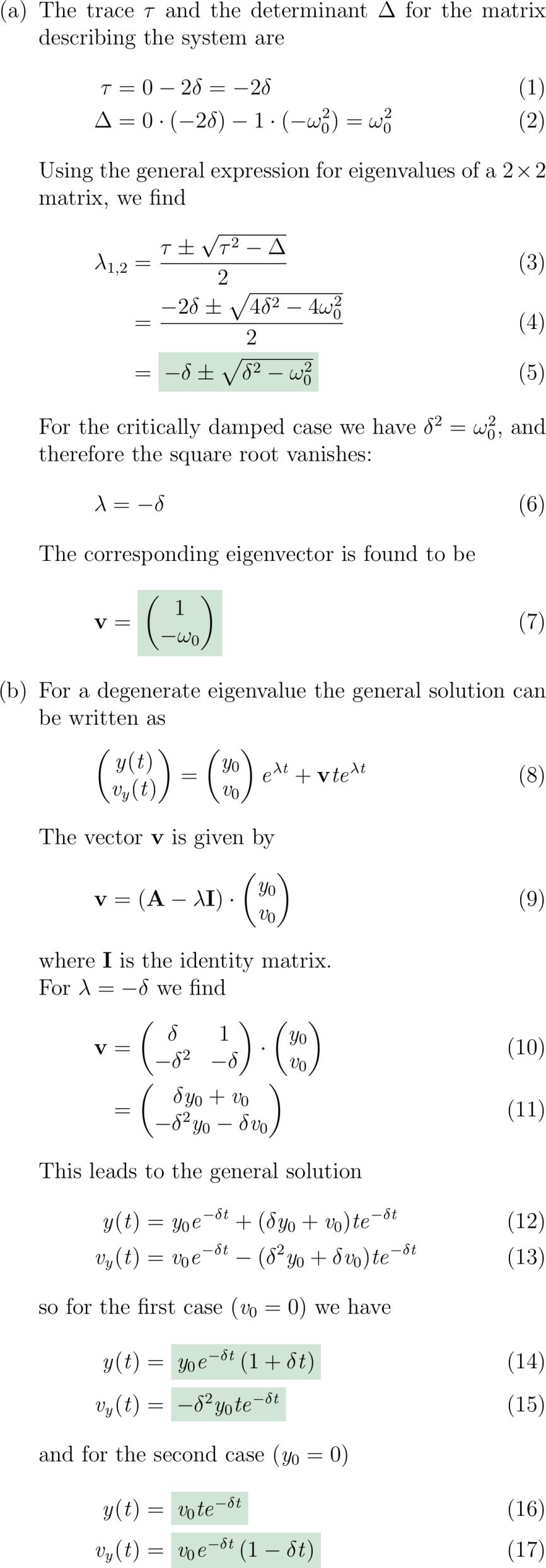
abcliste abc The trace tau and the determinant Delta for the matrix describing the system are tau -delta -delta Delta -delta--omega_^omega_^ Using the general expression for eigenvalues of a times matrix we find lambda_ fractaupmsqrttau^-Delta frac-deltapmsqrtdelta^-omega_^ result-deltapmsqrtdelta^-omega_^ For the critically damped case we have delta^omega_^ and therefore the square root vanishes: lambda -delta The corresponding eigenvector is found to be bf v resultleftmatrix -omega_ matrixright abc For a degenerate eigenvalue the general solution can be written as leftmatrixyt v_ytmatrixright leftmatrixy_ v_matrixrighte^lambda t+bf v t e^lambda t The vector bf v is given by bf v bf A-lambda bf I leftmatrix y_ v_matrixright where bf I is the identity matrix. For lambda-delta we find bf v leftmatrix delta & -delta^ & -delta matrixright leftmatrixy_ v_matrixright leftmatrix delta y_ + v_ -delta^ y_-delta v_ matrixright This leads to the general solution yt y_ e^-delta t+delta y_+v_ t e^-delta t v_yt v_ e^-delta t-delta^ y_+delta v_ t e^-delta t so for the first case v_ we have yt resulty_ e^-delta tleft+delta tright v_yt result-delta^ y_ t e^-delta t and for the second case y_ yt resultv_ t e^-delta t v_yt resultv_ e^-delta tleft-delta tright abcliste
A linearly damped oscillator can be described by the following system of differential s: fracddtleftmatrixy v_ymatrixright leftmatrix & -omega_^ & -deltamatrixright leftmatrixy v_ymatrixright abcliste abc Find the eigenvalues and eigenvectors. Show that the system has a degenerate eigenvalue for deltaomega_ critical damping. abc Derive the solutions for the initial conditions yy_ v_y start from rest and y v_yv_ initial push. abcliste
Solution:
abcliste abc The trace tau and the determinant Delta for the matrix describing the system are tau -delta -delta Delta -delta--omega_^omega_^ Using the general expression for eigenvalues of a times matrix we find lambda_ fractaupmsqrttau^-Delta frac-deltapmsqrtdelta^-omega_^ result-deltapmsqrtdelta^-omega_^ For the critically damped case we have delta^omega_^ and therefore the square root vanishes: lambda -delta The corresponding eigenvector is found to be bf v resultleftmatrix -omega_ matrixright abc For a degenerate eigenvalue the general solution can be written as leftmatrixyt v_ytmatrixright leftmatrixy_ v_matrixrighte^lambda t+bf v t e^lambda t The vector bf v is given by bf v bf A-lambda bf I leftmatrix y_ v_matrixright where bf I is the identity matrix. For lambda-delta we find bf v leftmatrix delta & -delta^ & -delta matrixright leftmatrixy_ v_matrixright leftmatrix delta y_ + v_ -delta^ y_-delta v_ matrixright This leads to the general solution yt y_ e^-delta t+delta y_+v_ t e^-delta t v_yt v_ e^-delta t-delta^ y_+delta v_ t e^-delta t so for the first case v_ we have yt resulty_ e^-delta tleft+delta tright v_yt result-delta^ y_ t e^-delta t and for the second case y_ yt resultv_ t e^-delta t v_yt resultv_ e^-delta tleft-delta tright abcliste